
机器人浪潮:兰宝编码器夯实智能制造精密底座
本篇文章1310字,读完约3分钟
在工业4.0与智能制造的浪潮下,工业机器人的疆域正不断扩张。其应用场景已从传统的焊接、搬运,延伸至3C电子精密装配、半导体晶圆传输、医疗手术器械操作,乃至人形机器人等高端领域。
然而,无论应用场景如何演变,机械臂运动控制的逻辑基石始终未变:想要“动得准”,必先“测得准”。
这正是位置反馈传感体系作为“物理标尺”不可替代的原因——它是连接数字指令与物理动作的核心枢纽,不仅构筑了伺服驱动的闭环,更决定了机械臂能否从“盲动”走向“智动”。
为应对多元需求,现代机械臂普遍采用增量型与绝对值型双轨并行的编码策略:前者凭高响应特性专注电机端的速度与动态控制,后者靠断电不丢位特性确保关节端的绝对位置精度与安全重启,二者协同构成了“感知—决策—执行”闭环的神经基础。
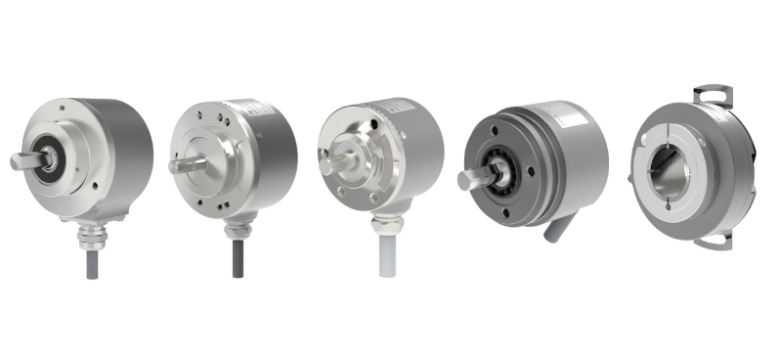
兰宝编码器产品主要分为ENI增量型与ENA绝对值型两大系列
其覆盖轴径Ø8~Ø12mm、多种轴型与安装方式的完整规格系列;外壳采用高强度铝合金材质,抗变形能力强,能在高速运转和外力冲击下保持稳定。
ENI系列 — 增量型编码器
增量型编码器的核心价值在于高响应速度下的角位移与转速实时反馈——它不记录"绝对位置",但通过A/B/Z相脉冲的精准计数,为伺服驱动器和运动控制器提供连续的转角变化量与速度信息,是机械臂各关节速度环与位置环闭环控制的基础信号源
ENA系列 — 绝对值型编码器
绝对值型编码器的关键优势是断电不丢位——每个机械位置对应唯一编码值,上电即知当前绝对角度,无需回零操作。这对机械臂在安全重启、急停恢复、多轴协同标定等场景至关重要。
兰宝编码器产品在机械臂中的应用
速度与位置动态控制:常用于机械臂电机端的增量型编码器,通过输出A/B相脉冲信号,实时监测电机转速和转动方向,为电机的速度环和电流环控制提供高频反馈,确保电机快速响应运动指令,适用于需要高速运动或频繁启停的机械臂关节。

高精度位置定位:机械臂关节通常采用绝对值型编码器,尤其是多圈绝对值编码器,可在上电瞬间直接读取关节的绝对位置,无需回零操作,确保机械臂在断电重启后能准确恢复到上次工作位置,适用于高精度加工、焊接、手术机器人等对位置精度要求极高的场景。
复杂运动轨迹规划:对于需要执行复杂运动轨迹的机械臂,如人形机器人、工业机器人多轴联动任务,绝对值型编码器提供的绝对位置信息是轨迹规划和实时控制的基础,确保机械臂能准确按照预定路径运动。

消除传动误差:在机械臂的关节输出端安装绝对值型编码器,可实时监测关节的实际位置,与电机端编码器的反馈信号进行对比,消除减速箱等传动部件的背隙、弹性变形等误差,提高末端执行器的定位精度。
“如果说伺服系统是机械臂的‘肌肉’,那么编码器便是其‘本体感觉神经’——它虽隐于关节内部,却实时决定着‘大脑’(控制器)对肢体位置的认知精度。正是基于这种高可靠、高确定性的位置反馈,这一核心感知能力得以从传统的重载工业机械臂,平滑拓展至对安全性要求更高的协作机器人,乃至工况复杂的物流装备,为智能制造全场景应用构筑了坚实的数据基石。”
随着具身智能与人形机器人赛道加速升温,对"更高集成度、更小体积、更强抗振"的编码器需求只会更迫切。
标题:机器人浪潮:兰宝编码器夯实智能制造精密底座
地址:http://www.huarenwang.vip/new/20181024/11.html
免责声明:人民时评网是一个为世界华人提供中国时政、财经、体育、娱乐各类评论分析的门户网站,部分内容来自于网络,不为其真实性负责,只为传播网络信息为目的,非商业用途,如有异议请及时联系btr2031@163.com,人民时评网的作者将予以删除。
上一篇:从麋鹿83.1km/h到三车夹击对撞,星途ES的“赛级民用”不是营销话术
下一篇:没有了
